
- Title
- Distributional and hierarchical reinforcement learning for physical systems with noisy state observations and exogenous
- Date
- 2023.08.10
- Writer
- 기계공학부
- 게시글 내용
-
Distributional and hierarchical reinforcement learning for physical systems with noisy state observations and exogenous perturbations
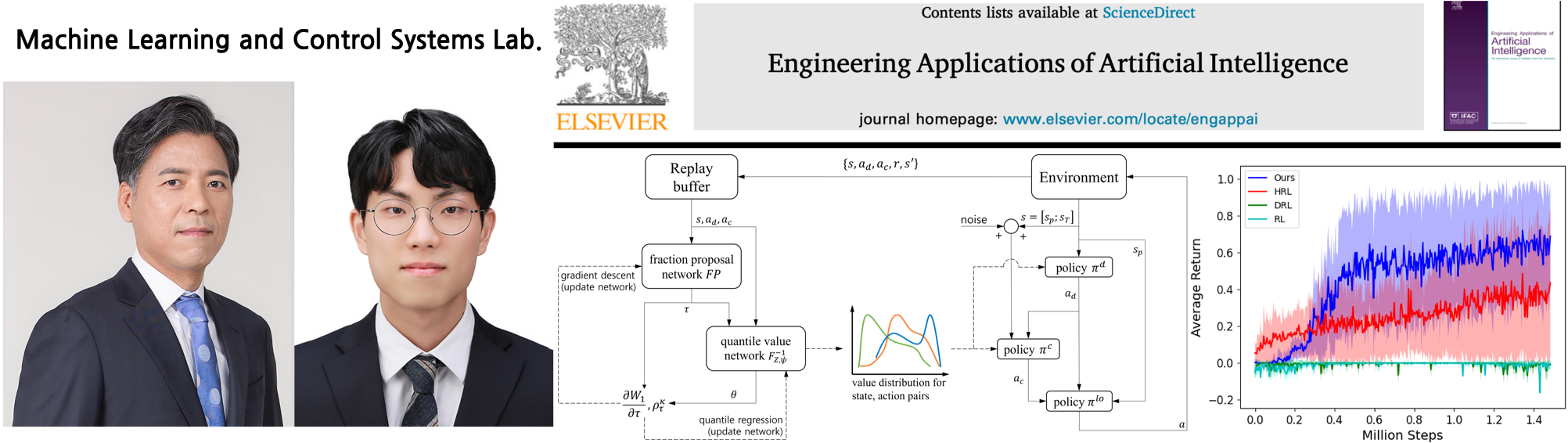
Professor Jongeun Choi's research team in the Department of Mechanical Engineering conducted a study on algorithm robust to noise and extrinsic perturbation by combining the advantages of distributed reinforcement learning and hierarchical reinforcement learning. This study was published in the journal of 'Engineering Applications of Artificial Intelligence' (Impact Factor: 8.000, top 5.55%, Volume 123) in May 2023. In this paper, our approach demonstrates promising results in handling uncertainties caused by noise and perturbations for challenging sparse-reward tasks, and could potentially pave the way for the development of more robust and effective reinforcement learning algorithms in real physical systems.
The link: doi.org/10.1016/j.engappai.2023.106465