
- 제목
- SE(3)-Equivariant Diffusion Models를 통한 비전 기반 로봇 매니퓰레이션 (2024.02.27)
- 작성일
- 2024.07.16
- 작성자
- 기계공학부
- 게시글 내용
-
SE(3)-Equivariant Diffusion Models를 통한 비전 기반 로봇 매니퓰레이션
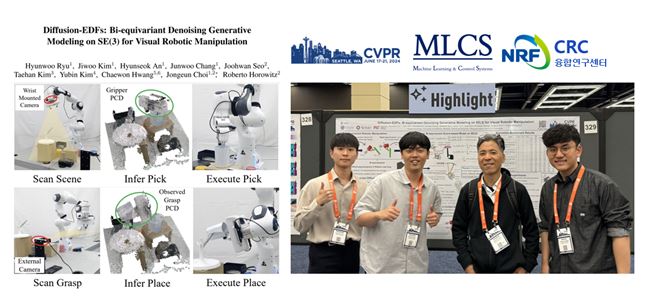
기계공학과 최종은 교수 연구팀(1저자 유현우 석사)은 세계 최초로 로봇 매니퓰레이션을 위한 비전 기반 SE(3)-Equivariant Diffusion Models을 AI 분야 세계 최고 수준의 컴퓨터 비전 국제 학회(h5-index: 422)인 2024년 “The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)”에 발표하였다. 2023년 AI 분야 세계 최고 머신러닝 국제 학회(h5-index: 303) “The International Conference on Learning Representations (ICLR)”에 발표되었던 “Equivariant Descriptor Fields (EDFs)” 의 후속 연구로, 이전 연구의 diffusion 모델 버전을 위해 새로운 이론들을 정립했다. SE(3)-Equivariance를 활용하여 처음 보는 자세의 대상 물체에도 강건하게 대응할 수 있으며, 모든 상황에 대한 학습이 필요하지 않아 데이터 효율적인 로봇 학습 모델이다. 일반적인 로봇 학습 모델은 학습을 위해 얻기 어려운 전문가의 로봇 학습 데이터가 수백 또는 수천 개 이상 필요하나, 본 연구는 5~10개의 데이터만으로 학습이 가능하다. 또한, 기존 연구들과는 달리 누구나 손쉽게 학습할 수 있는 End-to-End Learning이 가능하다. 본 연구의 우수성을 인정받아 2024년 "The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)”에서 Highlight 논문(전체 제출 논문 중 상위 2.8%, 게재된 논문 중 상위 11.9%)으로 선정되었다.